Double Pendulum System Modeling, Simulation & Animation in MATLAB Simulink Simscape
📖 Project Description
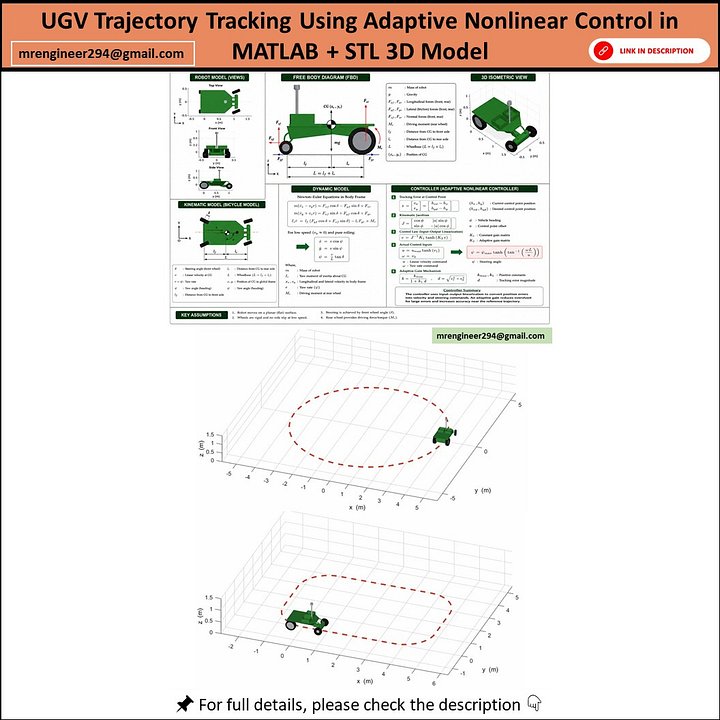
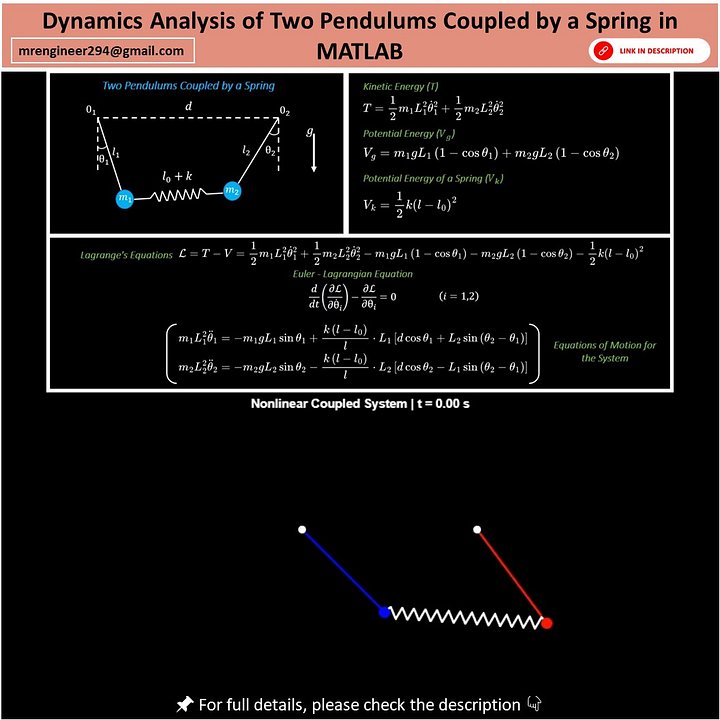
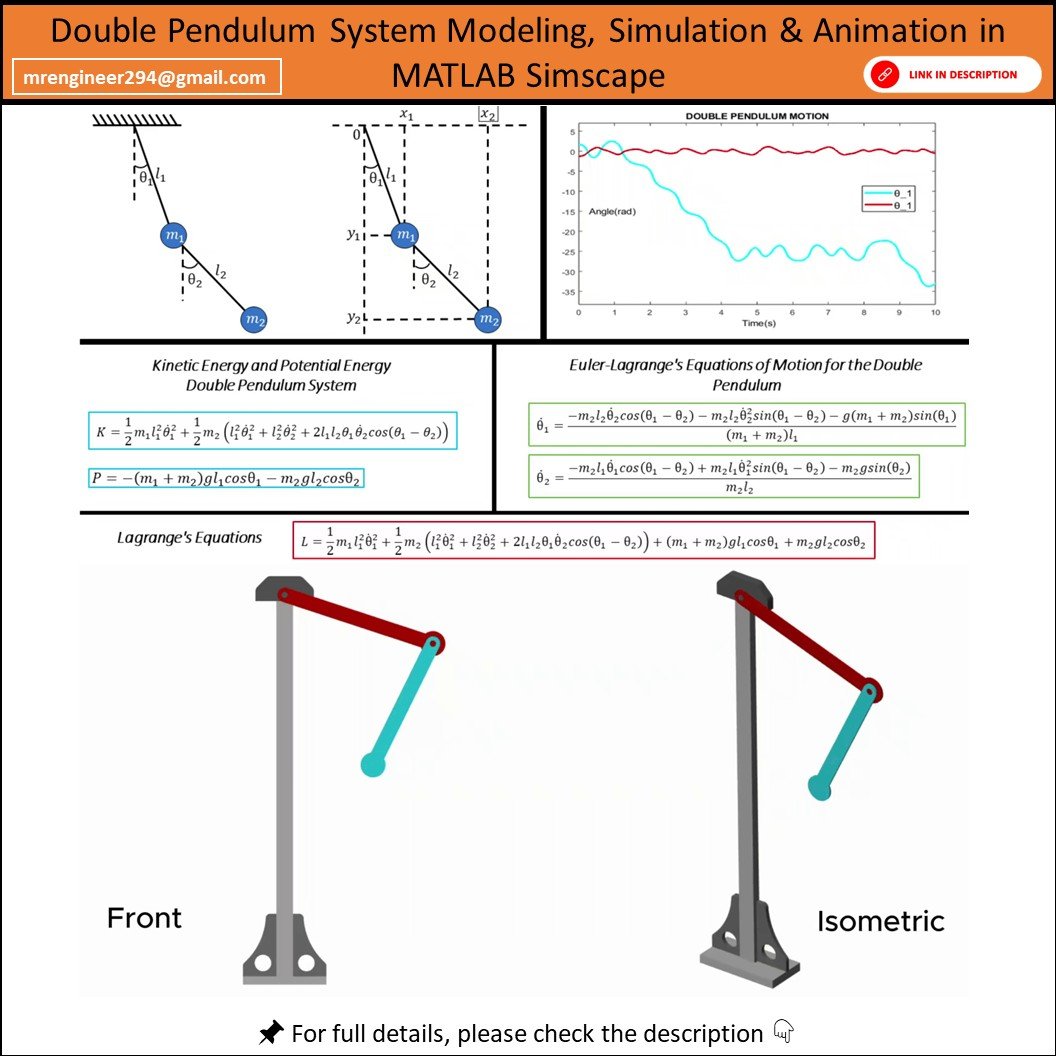
This project demonstrates the modeling, simulation, and animation of a Double Pendulum System using MATLAB Simulink & Simscape Multibody. The double pendulum is a classic example of a nonlinear dynamic system, widely studied in mechanical engineering, robotics, and control system design.
The project covers:
✔️ Building the double pendulum structure in Simscape Multibody
✔️ Defining links, joints, gravity, and motion constraints
✔️ Running time-domain simulations for different initial conditions
✔️ Visualizing pendulum dynamics through 3D animation
✔️ Extracting simulation data (angles, angular velocity, energy plots)
✔️ Studying the chaotic behavior of the pendulum
🎯 Learning Outcomes
After working with this project, you will:
✔️Understand nonlinear dynamic systems and chaotic motion.
✔️Learn how to model multibody mechanical systems in Simscape.
✔️Gain hands-on experience with MATLAB Simulink animations.
✔️Be able to modify and extend the system for control system design (PID, LQR, etc.).
📂 Project Deliverables
You will get:
✅ Complete MATLAB Simulink Model (.slx)
✅ Simscape Multibody setup with pendulum links & joints
✅ Animation model to visualize pendulum motion in real-time
✅ MATLAB scripts for data analysis & plotting
✅ Documentation / ReadMe file with step-by-step instructions
🛠️ Software & Tools Required
MATLAB 2020 or later (Simulink + Simscape Multibody)
Basic knowledge of dynamics & MATLAB Simulink
🌍 Applications
🎓 Academic Projects & Research (Dynamics, Nonlinear Systems, Chaos Theory)
🤖 Robotics & Control Engineering (balancing problems, stabilizers)
⚙️ Mechanical System Analysis (vibration, oscillation studies)
📚 Teaching & Learning (visualization of nonlinear dynamics)
🎥 Demo Preview
Includes realistic animation of double pendulum motion with chaotic trajectory visualization.
💡 Customization Options
We also provide:
🔹 Adding controllers (PID, LQR, MPC) for stabilization
🔹 Exporting simulation data for further analysis in Python / MATLAB
🔹 Extending the model to triple pendulum or cart-pendulum systems