Fuzzy Logic Based Obstacle Avoidance Robot using Simulink
🚀 Complete MATLAB & Simulink Robotics Project
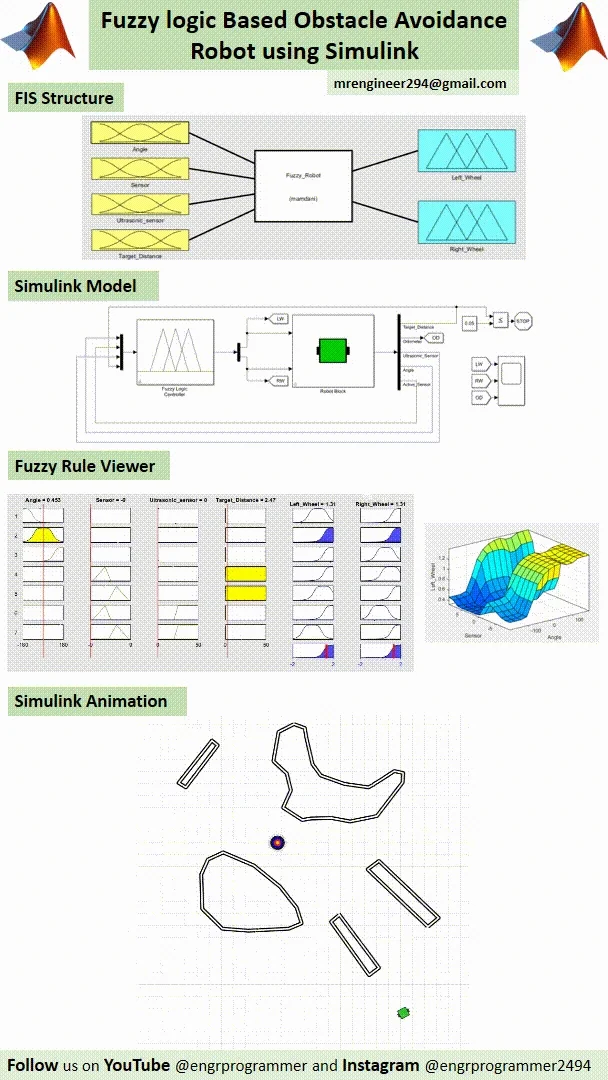
Develop and simulate an intelligent autonomous robot capable of obstacle avoidance and target navigation using a Mamdani Fuzzy Logic Controller. This project demonstrates how fuzzy logic can be applied to real-world robotic navigation problems without requiring an exact mathematical model of the environment.
Perfect for robotics enthusiasts, engineering students, researchers, and MATLAB learners looking for a practical fuzzy logic application.
📌 What This Project Does
The robot continuously analyzes sensor data and target information to make intelligent navigation decisions in a cluttered environment. Using fuzzy inference, it adjusts the left and right wheel velocities to:
✔ Avoid obstacles
✔ Navigate safely through complex environments
✔ Move toward a target location
✔ Generate smooth trajectories
✔ Demonstrate autonomous behavior
✨ Features
✅ Differential Drive Mobile Robot Model
✅ Mamdani Fuzzy Logic Controller
✅ Obstacle Avoidance System
✅ Target Tracking Navigation
✅ MATLAB & Simulink Implementation
✅ Fuzzy Membership Functions
✅ Rule Base Design
✅ Surface Viewer Analysis
✅ Real-Time Robot Animation
✅ Simulation Video Included
✅ Well-Organized Project Files
📊 Technical Highlights
Inputs
Heading Angle (θ)
Sensor Distance
Ultrasonic Sensor Reading
Target Distance
Outputs
Left Wheel Velocity (VL)
Right Wheel Velocity (VR)
Control Method
Mamdani Fuzzy Inference System
Centroid Defuzzification
Rule-Based Decision Making
📂 Files Included
MATLAB Files
Source Code (.m)
Simulink Models
Complete Simulink Project (.slx)
Fuzzy Logic Controller
Fuzzy_Robot.fis
Environment Files
Obstacle Data Files
Robot Initialization Files
Animation Functions
Project README
Media
Simulation Video
Project Images
🎓 Suitable For
Final Year Engineering Projects
Robotics Courses
MATLAB Learning
Fuzzy Logic Studies
Autonomous Navigation Research
Control Systems Projects
AI & Intelligent Systems Education
💻 Software Requirements
MATLAB R2020a or newer
Simulink
Fuzzy Logic Toolbox
📈 Learning Outcomes
By studying this project, you will learn:
Fuzzy Logic Controller Design
Membership Function Development
Rule Base Construction
Differential Drive Robot Modeling
Obstacle Avoidance Algorithms
MATLAB Simulation Techniques
Simulink System Integration
Autonomous Robot Navigation
🎁 Deliverables
✔ Complete MATLAB Source Code
✔ Simulink Models
✔ Fuzzy Logic Controller (.fis)
✔ Obstacle Environment Files
✔ Simulation Video
✔ README
Application Area
Autonomous Navigation, Mobile Robotics, Fuzzy Logic Control, Obstacle Avoidance
📥 Instant Digital Download