
Quadcopter Dynamics & LQR Control | 3D Drone Trajectory Tracking in MATLAB
This project delivers a complete Quadcopter (UAV) simulation in MATLAB with advanced state-space modeling and Linear Quadratic Regulator (LQR) optimal control design for stable flight and precise 3D trajectory tracking.
It demonstrates how modern drones are controlled using optimal control theory, making it highly valuable for learning, research, and academic projects.
🎯 Perfect For:
✔️ Students working on control systems, UAVs, robotics, and aerospace projects
✔️ Researchers exploring optimal control and state-space methods
✔️ Engineers developing MATLAB-based drone simulations
✔️ Hobbyists interested in realistic quadcopter dynamics and LQR control
📌 Features Included:
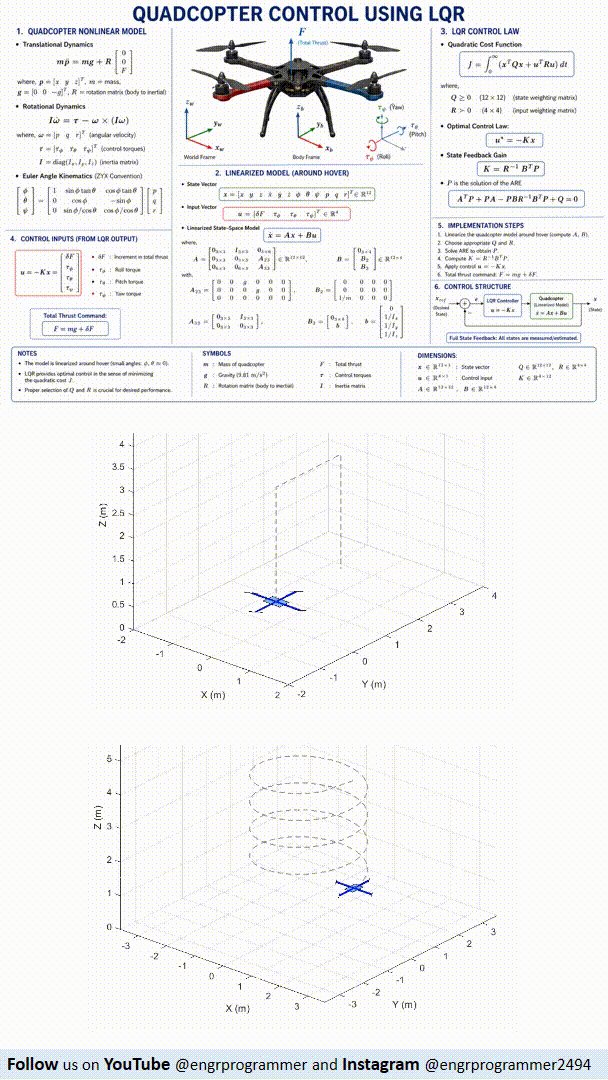
✅ Complete nonlinear quadcopter dynamics (translation + rotation)
✅ State-space model formulation (A, B matrices)
✅ LQR optimal controller design (K matrix computation)
✅ Stability-based position and attitude control
✅ Reference trajectory generator:
- Circle
- Helix
- Figure-8 (Lemniscate)
- Mission: Takeoff → Move → Land
✅ 3D real-time visualization of drone motion
✅ Reference vs actual trajectory comparison
✅ Clean and modular MATLAB implementation
✅ Fully commented code for easy understanding
✅ Ready-to-run simulation (no extra setup required)
📦 Deliverables:
📂 You will receive a complete MATLAB project package including:
- MATLAB scripts for quadcopter dynamics & LQR controller
- State-space model implementation files
- Trajectory generation module
- 3D simulation & animation script
- README file with step-by-step execution guide
- Visual diagrams of:
- Quadcopter dynamics
- State-space model
- LQR control law equations
📌 Applications:
🛩️ UAV / Drone control system simulation
📚 Final year engineering projects (FYP)
🤖 Robotics & autonomous systems learning
🛰️ Aerospace control system research
📊 MATLAB / Simulink advanced projects
🎓 Academic thesis and publications support
🚀 Why This Project is Valuable
This project is not just a simulation — it demonstrates real-world optimal control techniques used in modern UAV systems, making it highly suitable for:
- Research-level understanding
- Strong academic portfolio projects
- Professional engineering demonstrations





