
Deep Reinforcement Learning–Based Bipedal Robot Walking in MATLAB (DDPG)
🚀 Train a 6-DOF Biped Robot to Walk Using Actor–Critic DRL
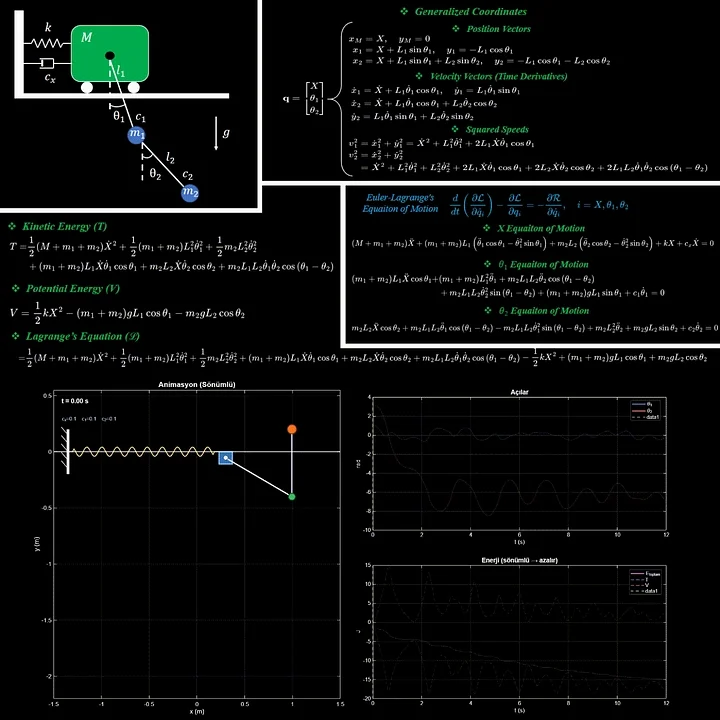
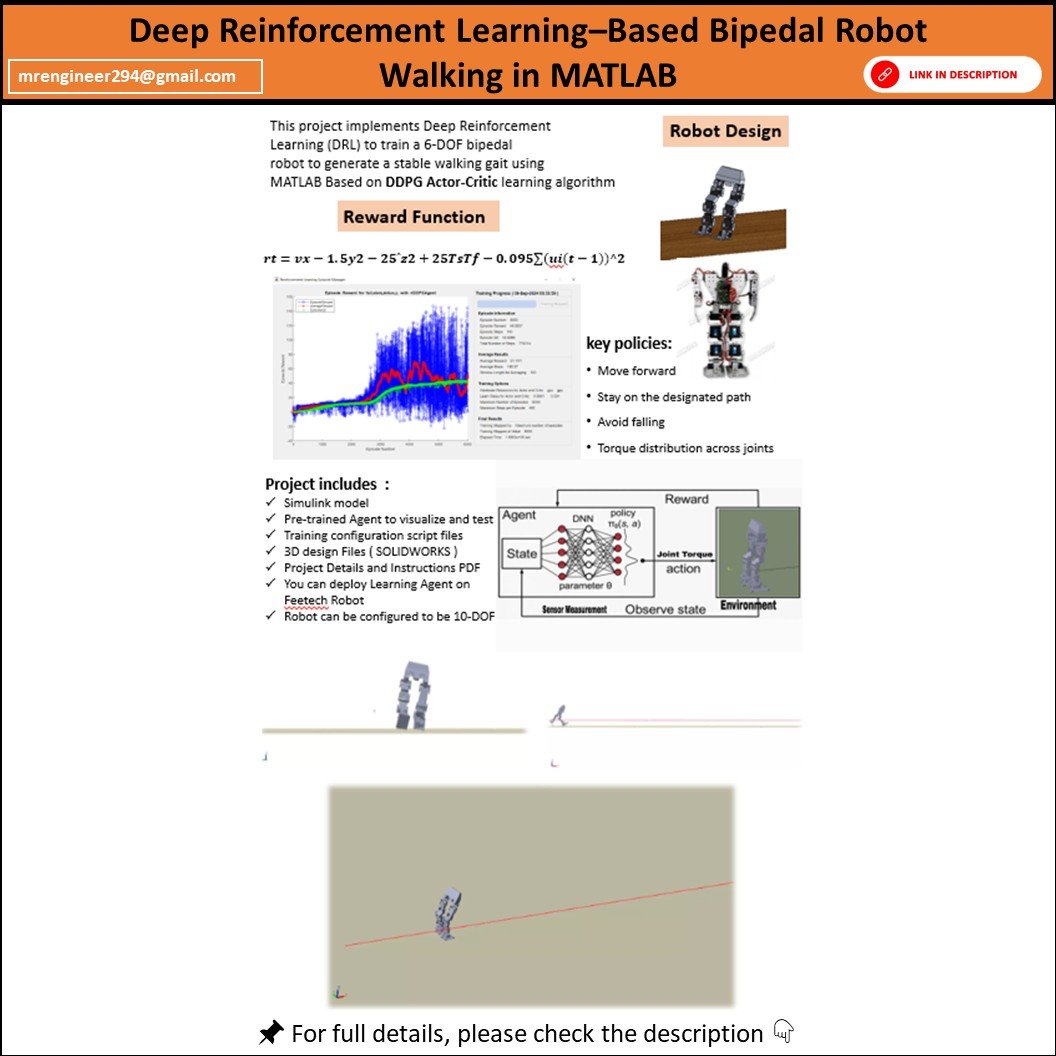
This project demonstrates a complete Deep Reinforcement Learning (DRL) framework for training a bipedal robot to achieve a stable and efficient walking gait using MATLAB & Simulink. The robot learns to walk through interaction with its environment using the DDPG (Deep Deterministic Policy Gradient) actor–critic algorithm.
Designed for both simulation and real hardware deployment, this package is ideal for academic projects, research, and robotics enthusiasts aiming to explore learning-based locomotion.
🔧 Key Features
✅ DDPG Actor–Critic based control architecture
✅ Stable walking gait generation for biped robot
✅ Supports 6-DOF and configurable to 10-DOF robot models
✅ MATLAB & Simulink integrated environment
✅ Pretrained agent for instant testing and visualization
✅ Real-time compatible for Feetech servo-based robots
✅ Modular and well-documented codebase
🎯 Learning Objectives / Policies
The DRL agent is trained to:
-
➡️ Move forward efficiently
-
🛤️ Stay on a designated path
-
⚖️ Maintain balance & avoid falling
-
🔄 Distribute torque optimally across joints
-
🤖 Generate smooth and stable walking motion
📦 What’s Included
You’ll receive a complete, ready-to-use project package:
📁 MATLAB/Simulink biped robot model
🤖 Pretrained DRL Agent for testing & visualization
📝 Training configuration & script files
🦿 3D CAD files of robot design (SOLIDWORKS)
📄 Detailed Project Instructions & Guide (PDF+Demo video)
🔌 Hardware deployment support for Feetech robots
🛠️ Applications
-
🎓 Final year & MSc/PhD robotics projects
-
🧪 Research in legged locomotion & AI control
-
🏫 MATLAB/Simulink learning for DRL
-
🤖 Real robot gait control experiments
-
🧠 Understanding actor–critic algorithms in practice
💻 Requirements
-
MATLAB with:
-
Reinforcement Learning Toolbox
-
Simulink
-
Control System Toolbox (recommended)
-
-
SOLIDWORKS (to view/edit CAD files)
🌟 Why Buy This Project?
✔️ Saves months of development time
✔️ Clean, modular, and customizable framework
✔️ Simulation + real robot deployment ready
✔️ Perfect for reports, demos, and publications
✔️ High-quality visuals & professional structure