Modeling and Simulation for the Excavator in MATLAB Simscape - PID Control
📖 Project Description
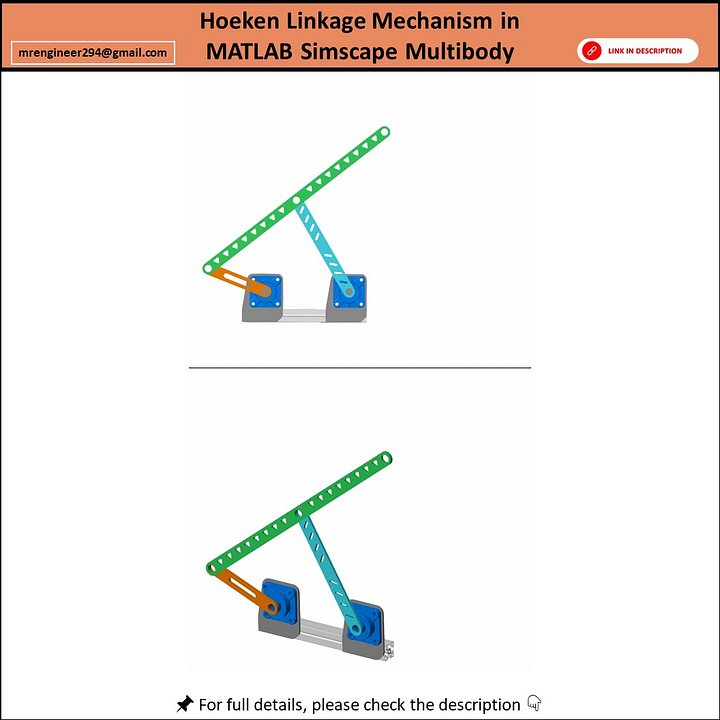
This project demonstrates the modeling, simulation, and PID control of an excavator system using MATLAB Simulink & Simscape Multibody.
The excavator is modeled as a hydraulic-mechanical system consisting of boom, arm, and bucket with joint dynamics. The system is controlled using a PID controller to track desired trajectories and ensure smooth, stable motion during digging and lifting operations.
The project covers:
✔️ Building the excavator structure in Simscape Multibody
✔️ Modeling hydraulic actuators for realistic joint motion
✔️ Implementing PID controllers for each joint (boom, arm, bucket)
✔️ Simulating digging & lifting trajectories
✔️ Visualizing the excavator operation with 3D animation
✔️ Extracting system data (joint angles, velocities, forces, errors)
🎯 Learning Outcomes
After working with this project, you will:
Understand the kinematics and dynamics of an excavator system.
Learn how to model multibody machinery in Simscape.
Gain experience in PID control system design and tuning.
Acquire skills to extend control methods (e.g., LQR, MPC) for heavy machinery.
📂 Project Deliverables
You will receive:
✅ Complete MATLAB Simulink Model (.slx)
✅ Simscape Multibody setup of excavator system
✅ PID Controller implementation for joint motion control
✅ 3D animation model for realistic visualization
✅ MATLAB scripts for data logging & plotting
✅ Documentation / ReadMe file with step-by-step instructions
🛠️ Software & Tools Required
MATLAB 2020 or later (Simulink + Simscape Multibody)
Basic knowledge of control systems & multibody dynamics
🌍 Applications
🎓 Academic Projects (Control, Robotics, Hydraulic Systems)
⚙️ Heavy Machinery Design & Simulation
📚 Teaching & Research (PID control of nonlinear systems)
🤖 Robotics & Automation (excavator robotics, trajectory tracking)
🎥 Demo Preview
Includes realistic 3D animation of excavator digging & lifting with smooth PID-controlled joint motion.
💡 Customization Options
We also provide:
🔹 Advanced controllers (LQR, MPC, Adaptive Control)
🔹 Hydraulic system modeling with nonlinear dynamics
🔹 Extending to autonomous excavation tasks