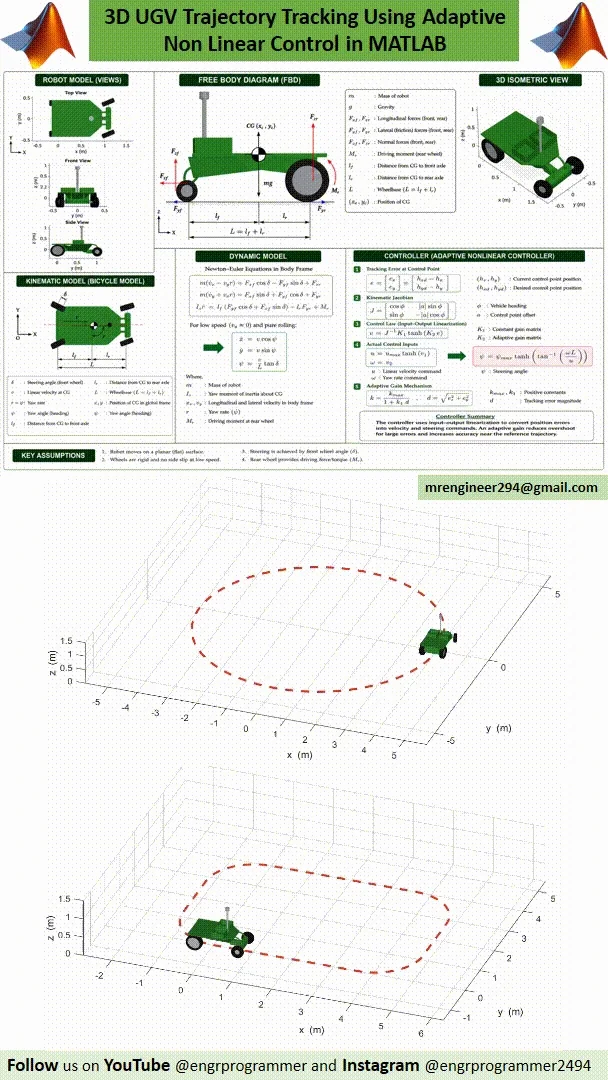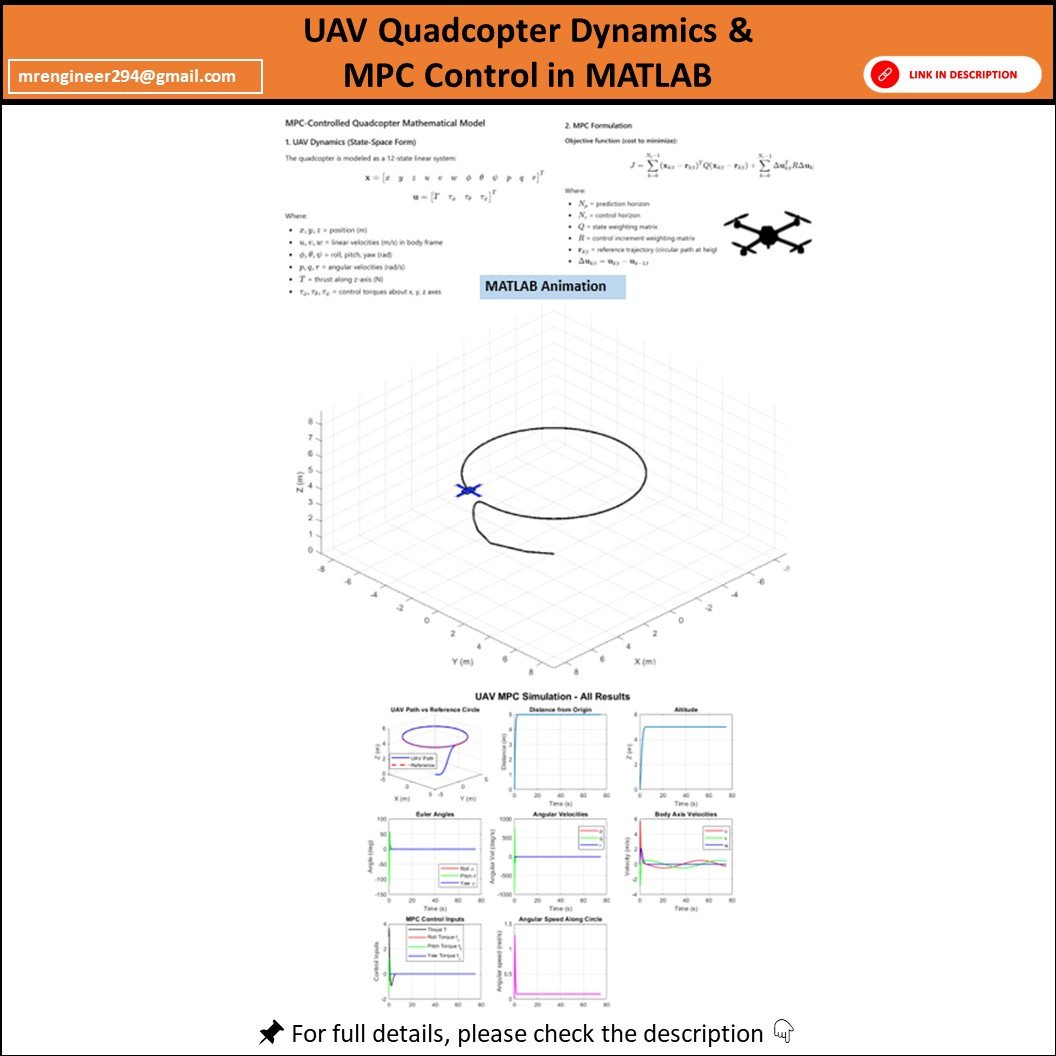
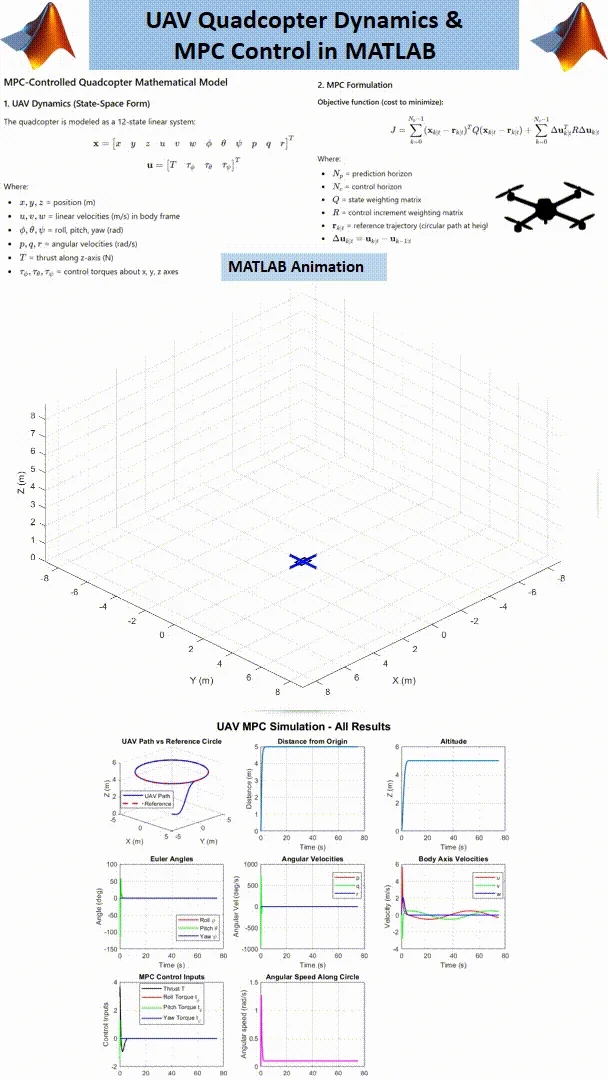
MPC Quadcopter UAV Simulation in MATLAB
This project is a complete Model Predictive Control (MPC) quadcopter simulation in MATLAB with realistic 3D animation. Track circular trajectories, visualize UAV states, and analyze control inputs in an interactive environment.
Key Features:
-
MPC Controller for UAV trajectory tracking 🚁
-
Realistic 3D animation with spinning rotors 🎮
-
Visualization of position, orientation, velocities, and control inputs 📊
-
Modular and well-commented MATLAB code 💻
Included Files:
-
mpc_quadcopter_simulation.m- main simulation script -
Animation.m- 3D quadcopter animation function -
Trajectory.m- trajectory generation utility -
README.pdf- project overview and instructions
Requirements:
-
MATLAB R2019a or later
-
Control System Toolbox
-
MPC Toolbox
Usage:
-
Open MATLAB and navigate to project folder.
-
Run
mpc_quadcopter_simulation.m. -
Customize parameters: UAV mass, trajectory radius, MPC horizons, animation speed.
Applications:
-
Robotics & UAV research
-
Control systems teaching
-
UAV trajectory planning
-
MATLAB engineering projects
Support & Contact: Engr Programmer
Email: mrengineer294@gmail.com
YouTube: @engrprogrammer
Instagram: @engrprogrammer2494