Pick and Place Robotic Arm Dynamic Modeling & Simulation in MATLAB Simscape
📝 Product Description:
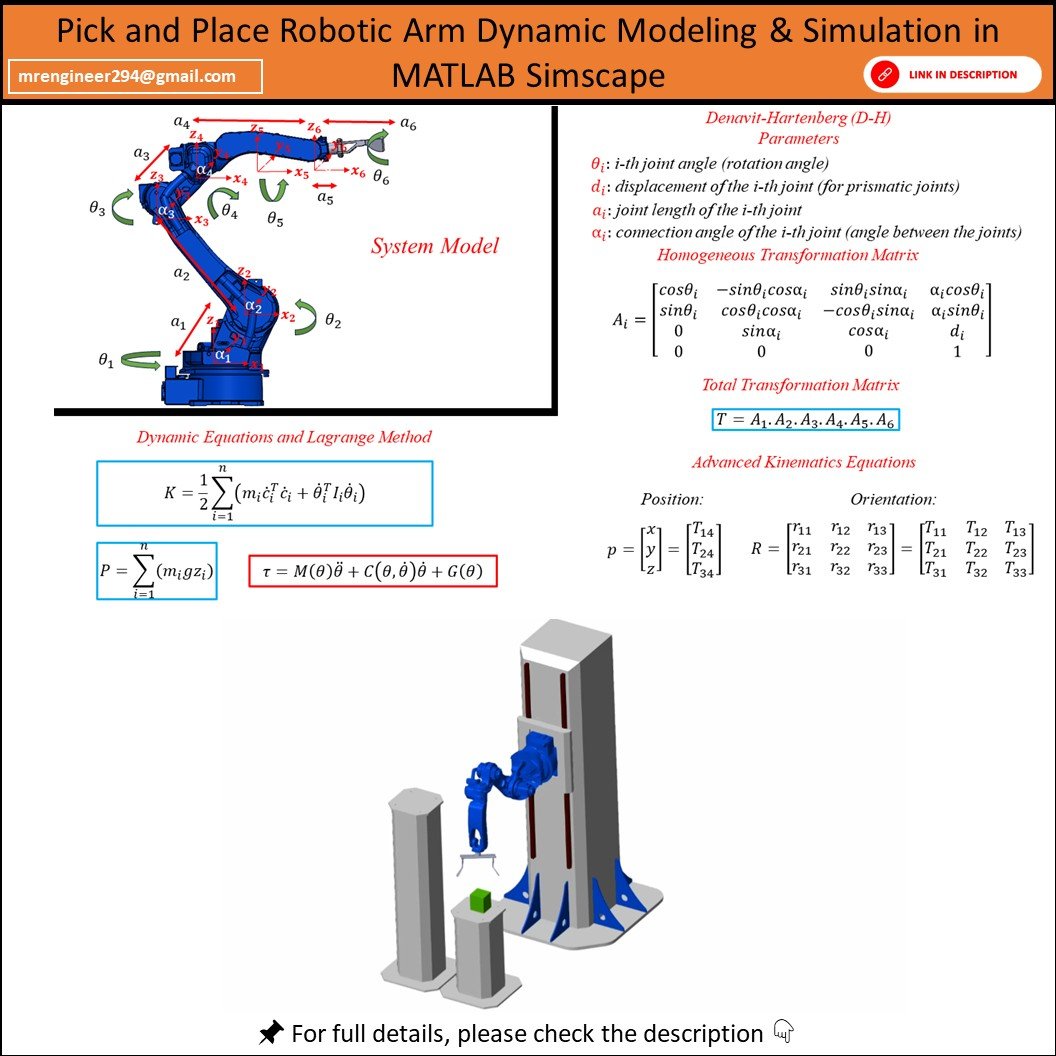
This complete package offers a powerful dynamic modeling and simulation of a 6-axis pick-and-place robotic arm using MATLAB Simscape, DH parameters, Lagrange equations, and PID control!
🔧 What’s Included in Your Download:
✅ Simulink + Simscape Model – Complete dynamic simulation (robot + base)
✅ SolidWorks CAD Files – Full robotic arm parts and assembly
✅ PID Control – Realistic joint actuation using PID controllers
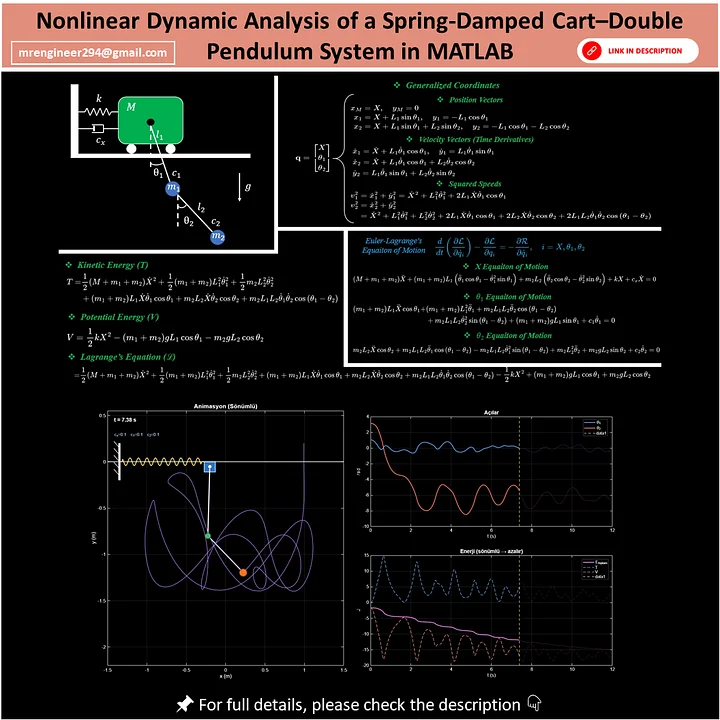
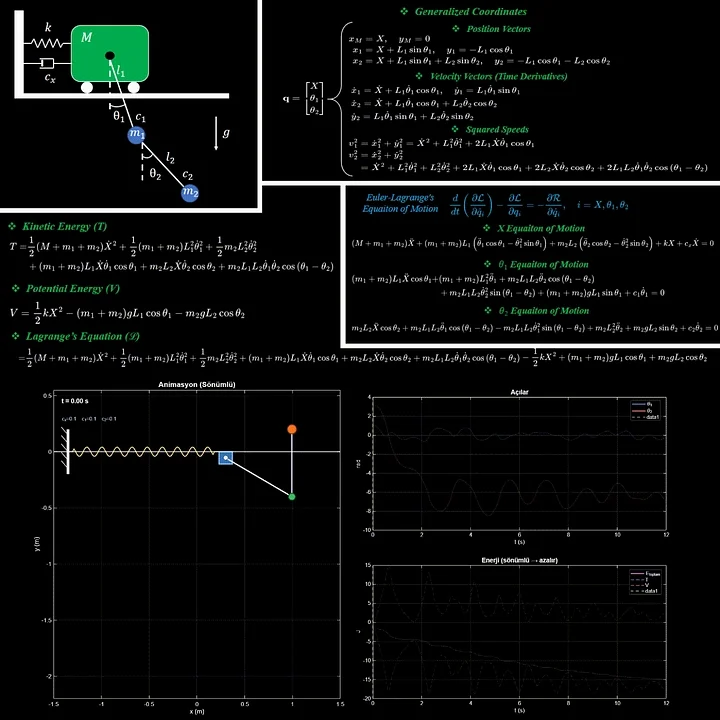
✅ Lagrangian & DH Modeling – Euler-Lagrange dynamics and transformation matrices shown
📚 Core Topics Covered:
6-DOF Serial Robot Kinematics
DH Parameter-Based Model
Lagrange Dynamic Equations
PID-Based Joint Control
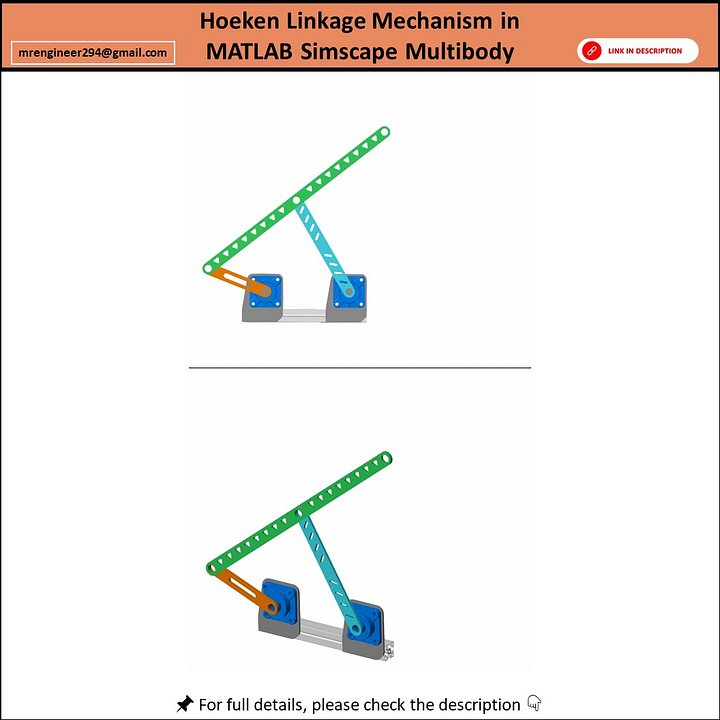
Simscape Multibody 3D Simulation
Industrial Pick and Place Setup
💡 Learning Outcomes:
Understand industrial robot dynamics and actuation
Visualize robot arm motion and joint coordination
Customize robot parameters from SolidWorks → MATLAB
Learn how PID controls each robotic joint
🧠 Who’s This For?
Robotics & Mechatronics Students
Engineers learning Simscape Multibody
Control System Designers
Anyone building robotic simulations in MATLAB!
🧾 Requirements
MATLAB R2024b or later
Toolboxes required:
Simscape Multibody
Simulink
Simscape
Recommended: Simscape Multibody Link for CAD import
📩 Need Help or Custom Features?
📧 Email: mregnineer294@gmail.com
🌐 Follow for More Projects:
📷 Instagram: @engrprogrammer2494
▶️ YouTube: @engrprogrammer