Quadcopter Dynamics & PID Control | 3D Drone Trajectory Tracking in MATLAB
📌 Product Overview
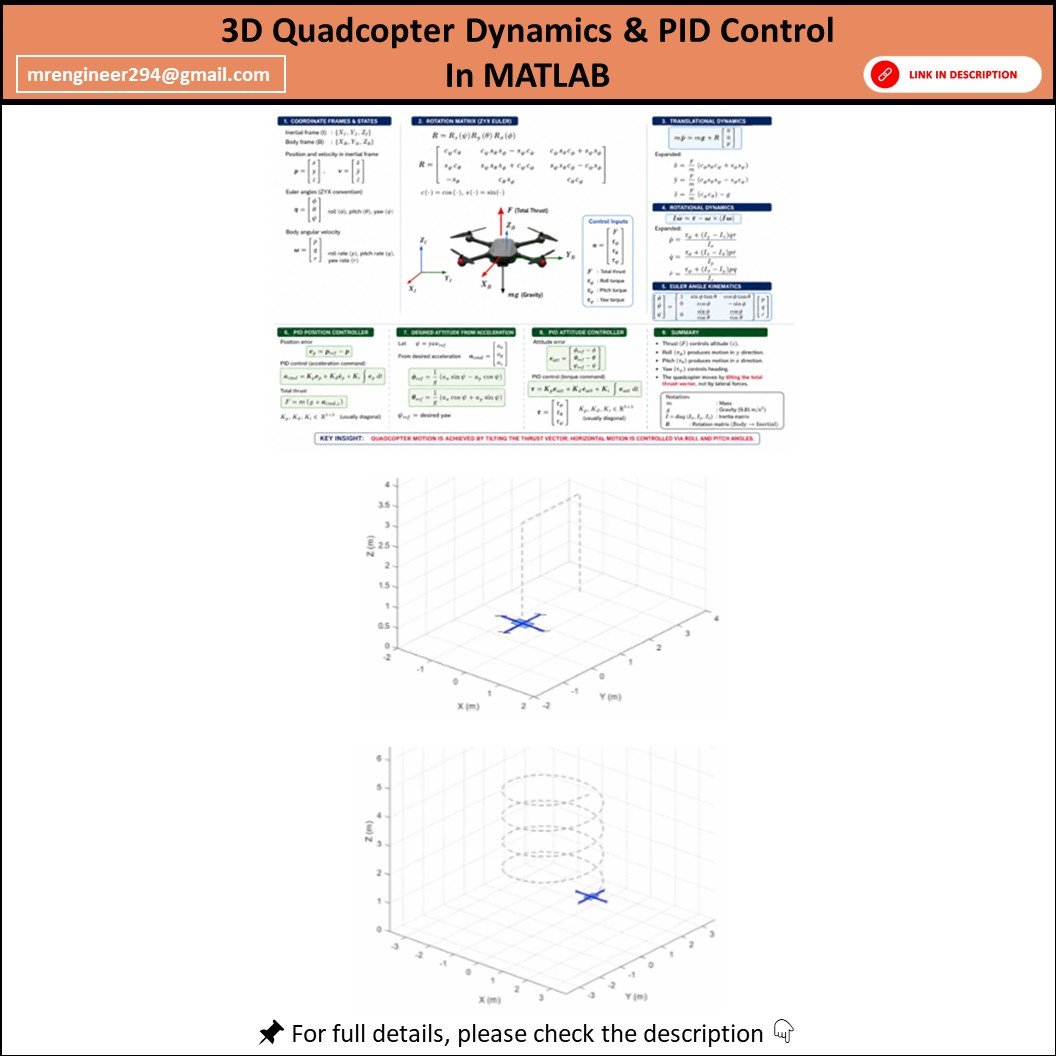
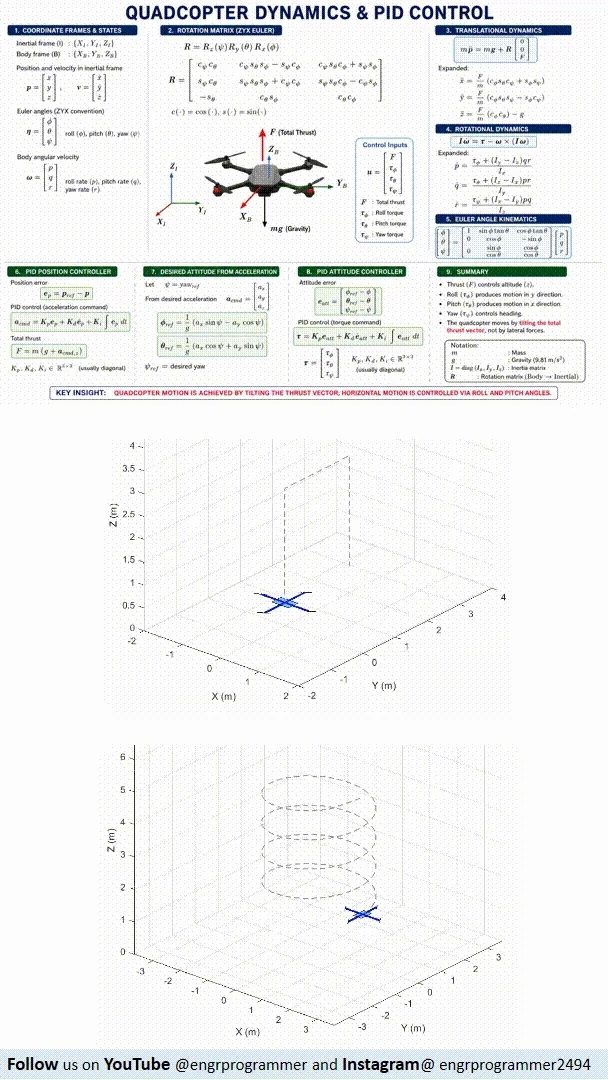
This is a complete engineering-grade MATLAB simulation of a quadcopter using a Cascaded PID control system for stable flight and trajectory tracking in 3D space.
Designed for students, researchers, and robotics enthusiasts, this project bridges the gap between control theory and real-world UAV behavior through realistic dynamics and visualization.
⚙️ What You Will Get
✔️ Full Quadcopter Nonlinear Dynamics (6-DOF Model)
✔️ Cascaded PID Controller (Position + Attitude Control)
✔️ Real-Time 3D Animation (Smooth Visualization)
✔️ Multiple Trajectory Generators:
- Circle
- Figure-8
- Helix
- Custom Path
✔️ Clean, Well-Structured MATLAB Code
✔️ Automatic Simulation Video Export (MP4)
✔️ Ready-to-Run Project (No setup complexity)
📊 Key Features
- Stable hover control
- Accurate trajectory tracking
- Physics-based realistic motion
- Tunable PID parameters
- Publication-style visualization
- Smooth rotor animation & trail tracking
🎯 Ideal For
✔️ Final Year Engineering Projects (FYP)
✔️ Robotics & Mechatronics Students
✔️ Control Systems Courses
✔️ MATLAB Simulation Learning
✔️ Academic Research & Demos
💡 Why This Project?
Most tutorials show only equations —
this project shows real motion behavior of a quadcopter in 3D space 🚁
You don’t just learn PID…
you see how it controls a flying system in real time.
📁 File Format
- MATLAB
.mfiles - Ready-to-run simulation
- No external toolboxes required (basic MATLAB only)
🚀 How to Use
- Download the project
- Open MATLAB
- Run main simulation file
- Select trajectory
- Watch real-time flight + save video
📈 Learning Outcomes
After using this project, you will understand:
- How quadcopter dynamics are modeled
- How PID controls nonlinear systems
- How cascaded control architecture works
- How trajectory tracking is implemented in UAVs
📩 Support
Need help or customization?
Feel free to contact on instagram @engrprogrammer2494 or email mrengineer294@gmal.com