Quadcopter Dynamics & SMC Control | 3D Drone Trajectory Tracking in MATLAB
📌 Overview:
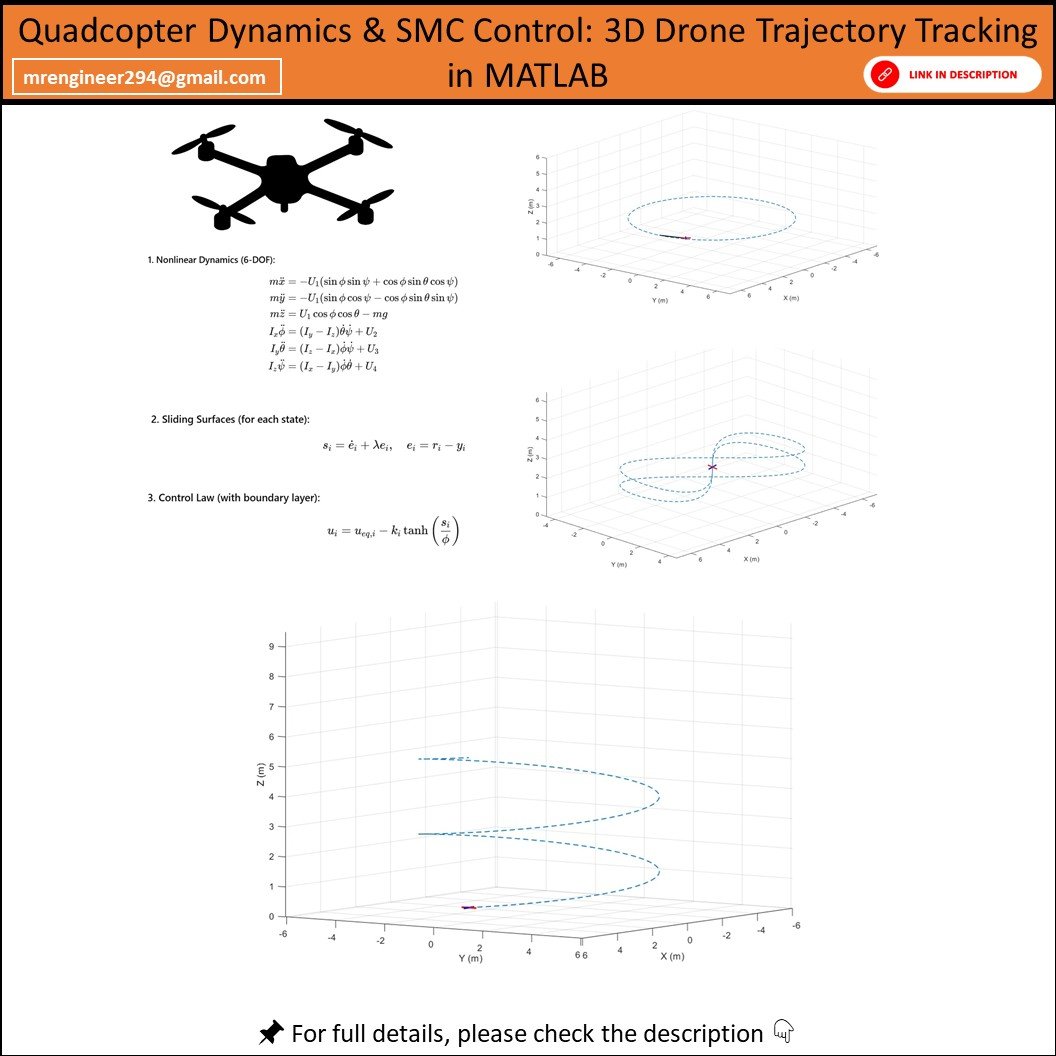
This project provides a complete quadcopter (UAV) simulation in MATLAB with Sliding Mode Control (SMC), including full dynamic modeling, robust control system design, and 3D trajectory tracking.
It is perfect for:
✔️ Students working on advanced control systems, UAVs, or robotics projects
✔️ Researchers exploring nonlinear and robust control methods
✔️ Hobbyists interested in drone dynamics & modern control techniques
📌 Features Included:
✅ Complete quadcopter dynamic equations (translation + rotation)
✅ Sliding Mode Controller (SMC) for robust position and attitude stabilization
✅ Reference trajectory generator (circle, helix, lemniscate, custom paths)
✅ 3D visualization of drone trajectory with reference tracking
✅ MATLAB model with modular & clean structure
✅ Fully commented code for easy understanding
✅ Ready-to-run files (no extra setup required)
📌 Deliverables:
📂 You will receive:
-
MATLAB scripts for quadcopter dynamics & SMC-based control
-
MATLAB model for drone simulation
-
Trajectory generator code
-
README file with step-by-step instructions
-
Images of quadcopter dynamics & SMC equations (for reports/presentations)
📌 Applications:
🛩️ UAV/Drone simulation projects
📚 Academic assignments & thesis work
🤖 Robust & nonlinear control theory practice
🛰️ Aerospace engineering research
🎓 MATLAB/Simulink learning