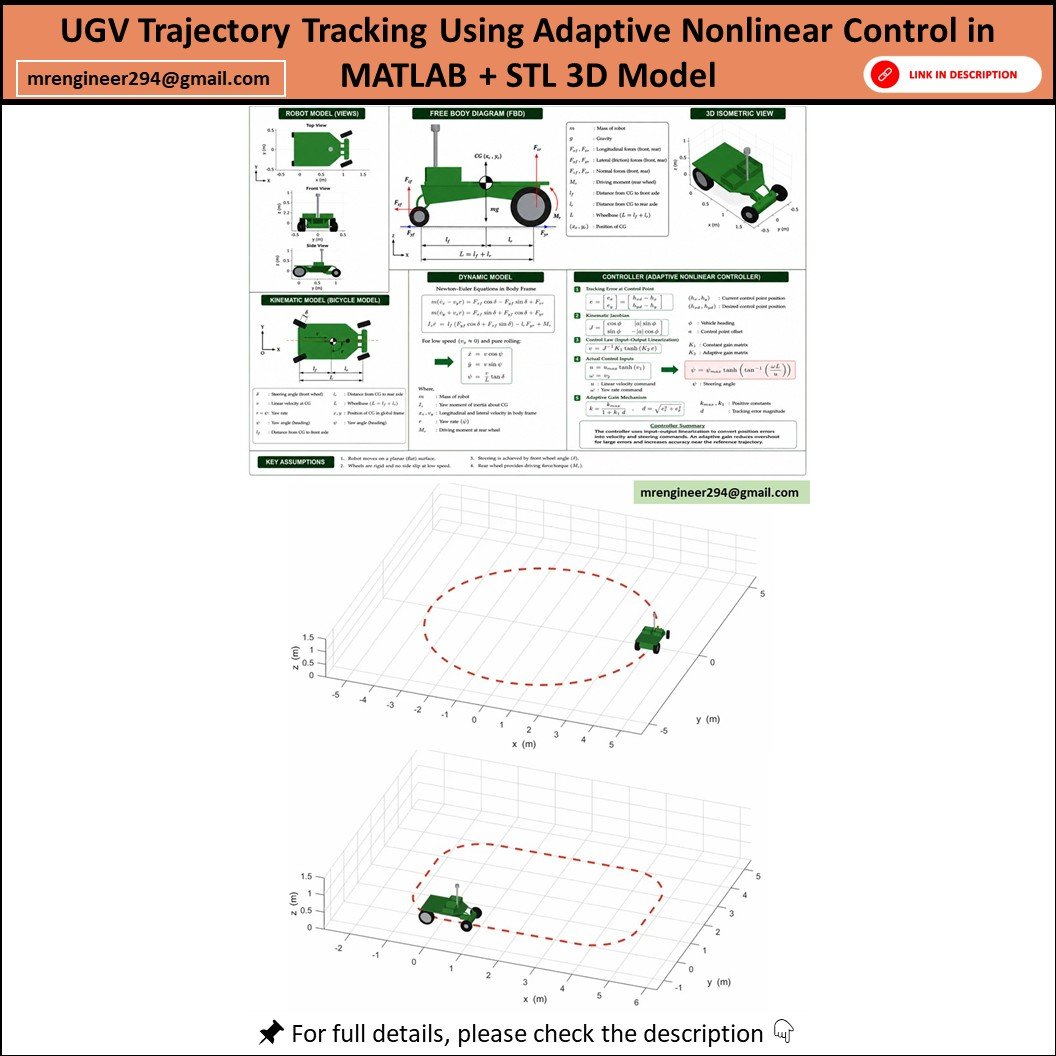
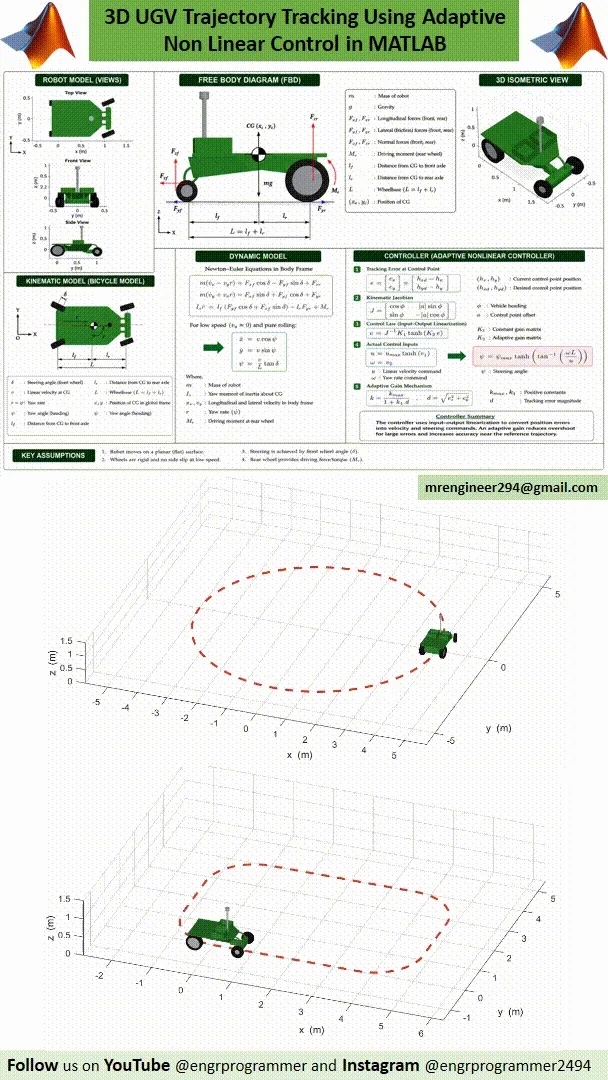
🚗 Project Overview
Develop and analyze an autonomous Unmanned Ground Vehicle (UGV) capable of accurately tracking multiple trajectories using an Adaptive Nonlinear Controller based on Input-Output Linearization. This professional MATLAB project includes realistic Ackermann steering kinematics, STL-based 3D vehicle visualization, real-time animation, performance analysis, and publication-quality plots.
The UGV successfully follows:
✅ Straight-Line Trajectory
✅ Circular Trajectory
✅ Rectangular Trajectory
while maintaining smooth steering behavior and low tracking error.
⭐ Key Features
✔ Adaptive Nonlinear Trajectory Tracking Controller
✔ Circle, Rectangle, and Line Path Following
✔ Ackermann Steering Vehicle Model
✔ Realistic STL-Based 3D UGV Visualization
✔ Real-Time MATLAB Animation
✔ Tracking Error Analysis and Performance Evaluation
✔ Publication-Quality Plots and Figures
✔ Fully Commented MATLAB Source Code
✔ Ready-to-Run Project Files
✔ Research and Academic Report Ready
📊 Outputs Included
- Desired vs Actual Trajectory Comparison
- Position Tracking Error Analysis
- Linear Velocity Response
- Angular Velocity Response
- Steering Angle Response
- Adaptive Gain Evolution
- Real-Time 3D Vehicle Animation
- High-Resolution Result Figures
- Professional Technical Documentation
🧠 Control Strategy
This project implements an:
Adaptive Input-Output Linearization Controller
The controller uses:
- Jacobian-Based Feedback Linearization
- Adaptive Gain Scheduling
- Steering Angle Constraints
- Nonlinear Trajectory Tracking
- Smooth Velocity Regulation
to achieve robust and accurate path-following performance for an Ackermann-steered mobile robot.
📚 Engineering Concepts Covered
- Mobile Robot Kinematics
- Ackermann Steering Geometry
- Autonomous Navigation
- UGV Path Tracking
- Adaptive Nonlinear Control
- Input-Output Linearization
- Feedback Linearization
- Robotics Simulation
- Trajectory Generation
- Vehicle Dynamics Modeling
- MATLAB Robotics Development
📦 Files Included
📁 MATLAB Source Code (.m)
📁 STL 3D UGV Model Files
📁 Visualization Functions
📁 Result Plots and Figures
📁 Technical Documentation
📁 Ready-to-Run Simulation Package
🎯 Ideal For
Students
- Final Year Projects (FYP)
- Bachelor Thesis
- Master Thesis
- Robotics Coursework
- Control Systems Assignments
Researchers
- Mobile Robotics Research
- Autonomous Vehicle Research
- Nonlinear Control Studies
- UGV Navigation Research
- Path Tracking Benchmarking
Engineers
- Robotics Engineers
- Mechatronics Engineers
- Control Engineers
- Autonomous Systems Developers
- MATLAB Simulation Developers
💻 Software Requirements
- MATLAB R2020a or Newer
- Windows / Linux Compatible
- No Additional Toolboxes Required
🚀 Why This Project?
Unlike basic trajectory-tracking examples, this package combines:
✅ Advanced Adaptive Control
✅ Multiple Reference Trajectories
✅ Professional 3D UGV Model
✅ Engineering-Grade Visualization
✅ Research-Oriented Implementation
✅ Ready-to-Use MATLAB Framework
making it suitable for academic research, engineering portfolios, publications, and commercial robotics development.
📩Instant Digital Downlaod after Purchase