Advanced Fuzzy Logic Obstacle Avoidance & Path Planning System in MATLAB
🤖 Product Overview
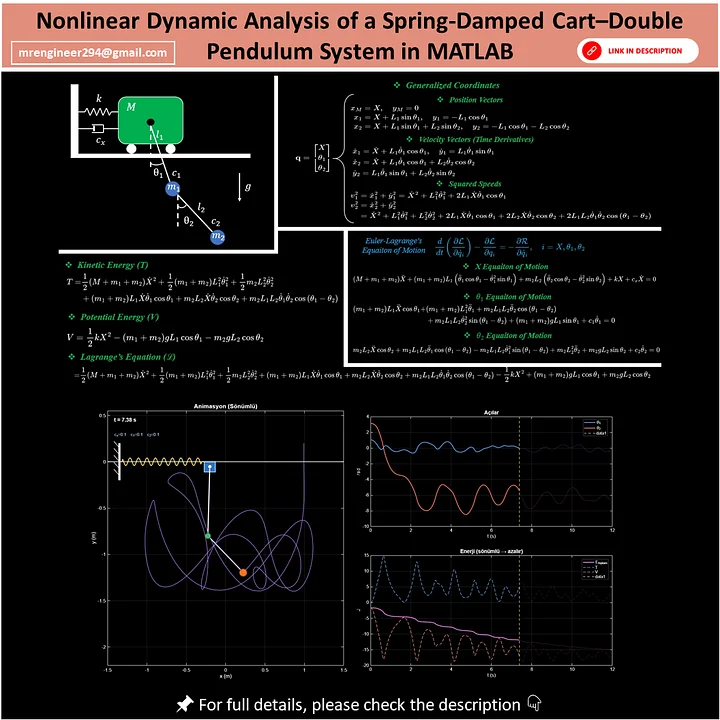
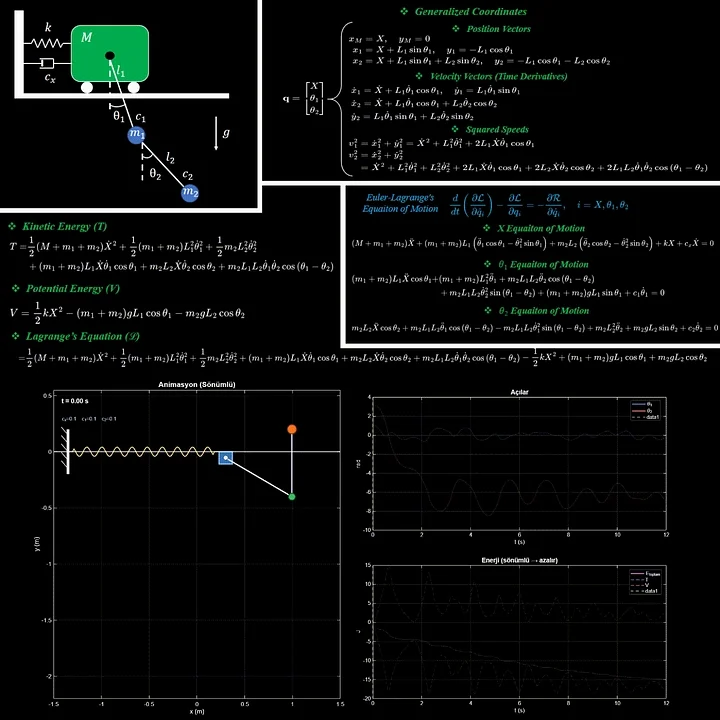
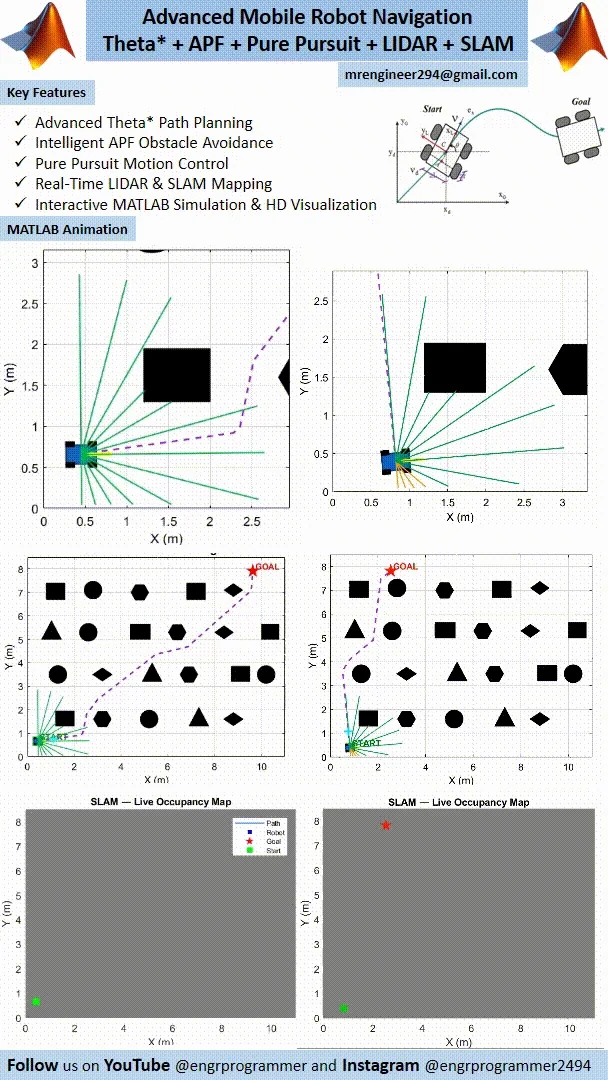
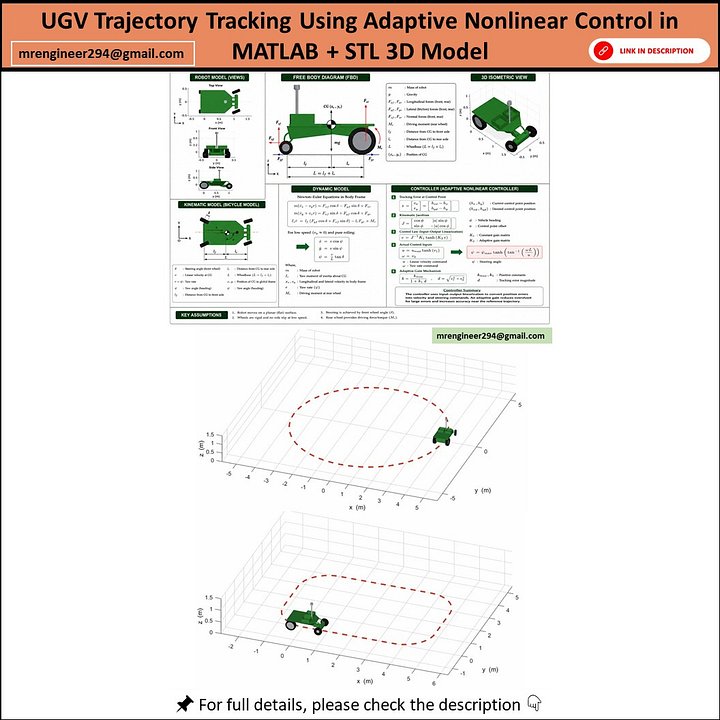
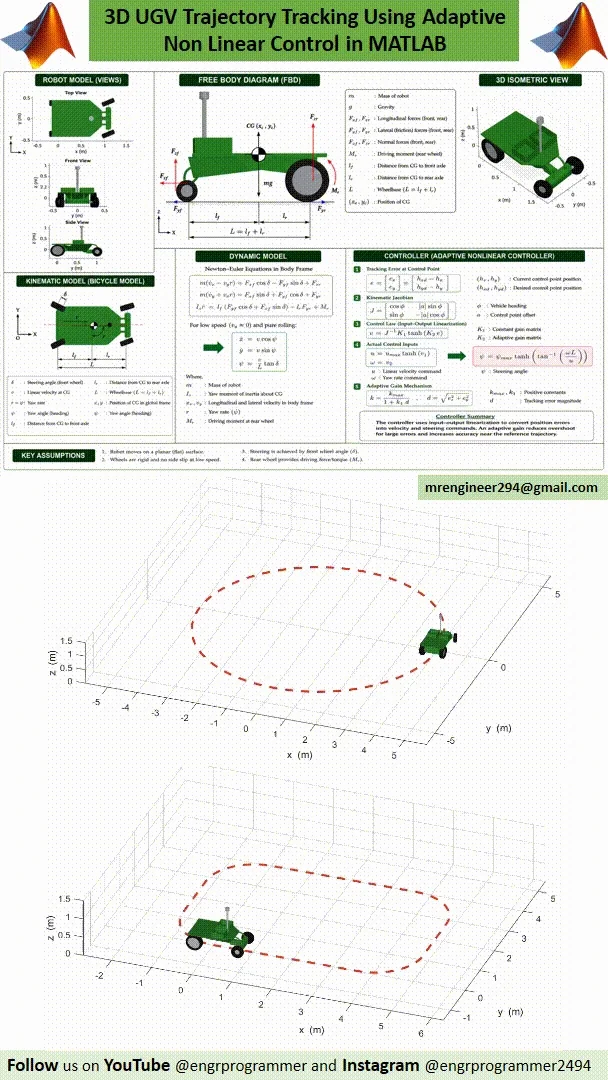
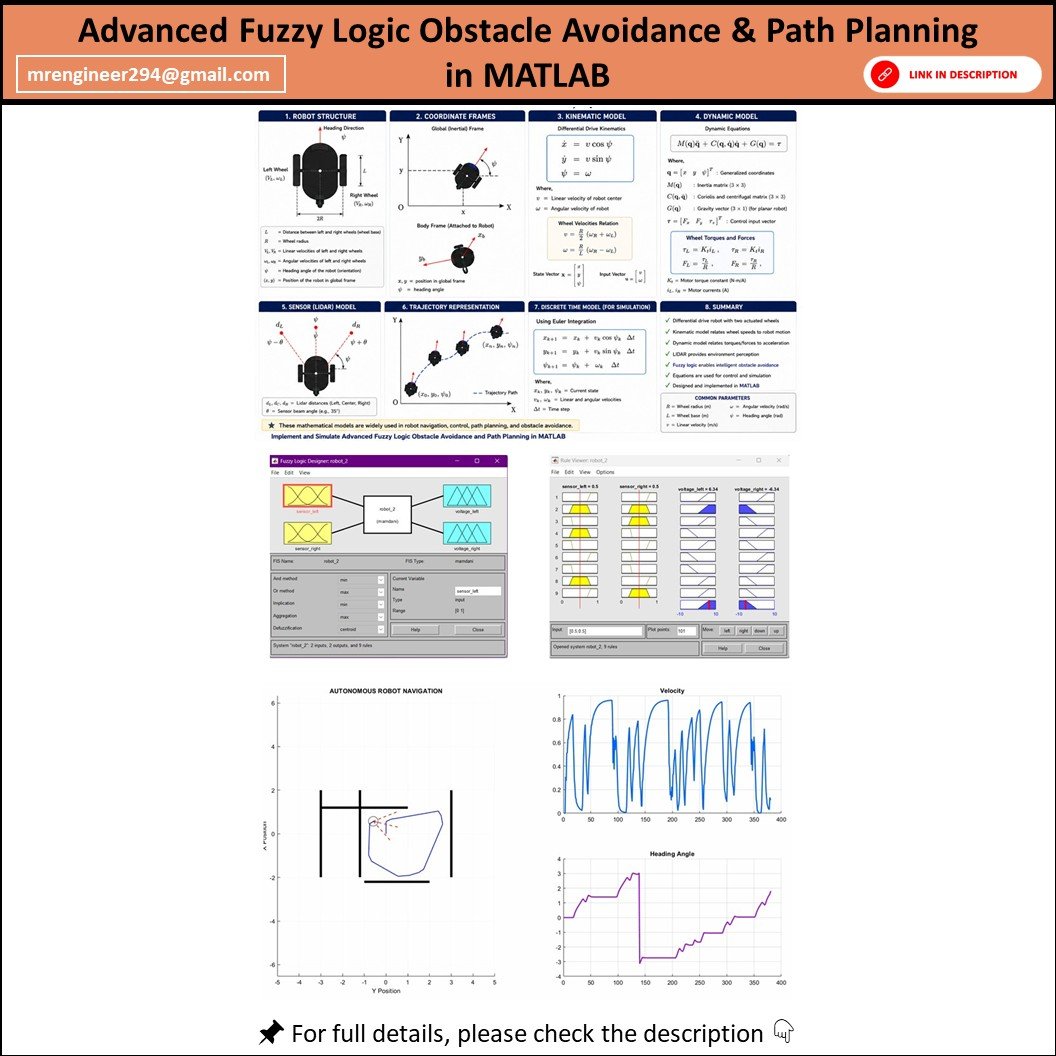
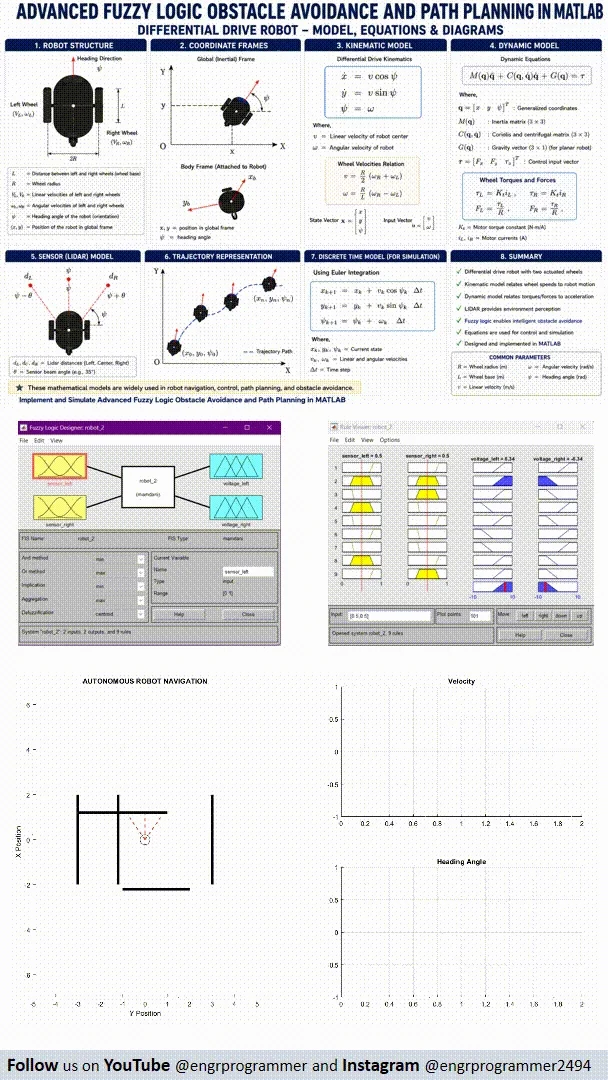
Design and simulate an intelligent autonomous robot navigation system using Fuzzy Logic Control in MATLAB. This project demonstrates a complete real-world robotics solution combining path planning, obstacle avoidance, sensor modeling (LIDAR), and differential drive kinematics in a single optimized simulation framework.
Perfect for final year projects, research work, and robotics learning, this system delivers both strong theoretical foundations and practical implementation.
💡 Key Features
✔ Fuzzy Logic Controller (Mamdani-type system)
✔ Autonomous Obstacle Avoidance Algorithm
✔ Intelligent Path Planning System
✔ Differential Drive Robot Kinematics
✔ LIDAR-Based Sensor Simulation
✔ Real-Time MATLAB Simulation
✔ Discrete-Time Control Implementation
✔ Smooth Trajectory Generation
✔ Dynamic Environment Compatibility (extendable)
✔ Research-Grade Mathematical Modeling
📦 What You Will Get
- ✔ Complete MATLAB Source Code (.m files)
- ✔ Fuzzy Logic Inference System (FIS file)
- ✔ Simulation Script with Visualization
- ✔ Robot Kinematics Implementation
- ✔ LIDAR Sensor Model Code
- ✔ Ready-to-run Project File Structure
- ✔ Documentation / Setup Guide (Readme.txt)
- ✔ Clean, editable code for customization
🎯 Applications
- Robotics Engineering Projects
- MATLAB & Simulink Learning
- AI-based Control Systems Study
- Final Year / Semester Projects
- Research in Autonomous Systems
- Teaching Fuzzy Logic & Intelligent Control
🧠 What Makes This Project Special?
This is not just a basic simulation — it is a fully engineered intelligent navigation system built using:
- Fuzzy logic decision-making (human-like reasoning)
- Real robot kinematics modeling
- Sensor-based environment interaction
- Path optimization in dynamic scenarios
It bridges the gap between theory and real robotics systems.
⚙️ Requirements
- MATLAB R2018 or above
- Fuzzy Logic Toolbox (recommended)
- Basic understanding of robotics or control systems
🚀 Why Buy This Project?
✔ Save weeks of development time
✔ Ready for academic submission or demo
✔ Fully editable and expandable code
✔ Professional-grade MATLAB implementation
✔ Ideal for final year distinction projects
📩 Support
If you need help understanding or modifying the project, support is available. Just reach out after purchase.
🔁 Bonus Idea (Upsell Option)
Upgrade available:
- Dynamic obstacle version
- ANFIS-based intelligent controller
- Multi-robot coordination system