SMC-Based Backstepping Trajectory Control for Quadcopter Drone in MATLAB
🎯 Overview
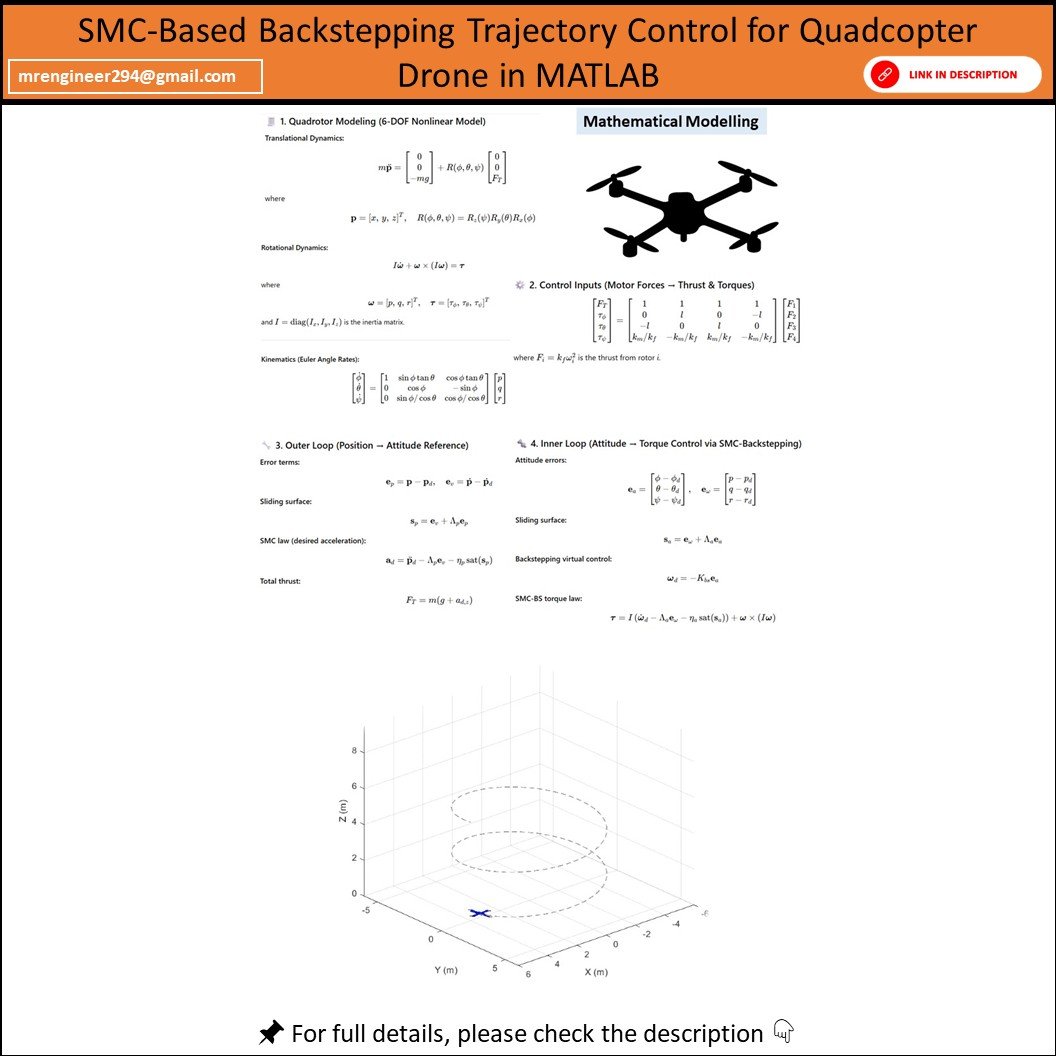
This MATLAB project simulates a Quadcopter UAV controlled using a Sliding Mode Control (SMC) integrated Backstepping strategy for precise 3D trajectory tracking. The simulation includes complete modeling, dynamics, controller design, and a smooth 3D animated visualization of the drone following a given path such as circle, helix, or lemniscate.
Built for researchers, students, and robotics enthusiasts — this project demonstrates robust nonlinear control for quadrotors under realistic dynamic conditions.
🚀 Key Features
✅ Complete 12-state quadcopter dynamics model
✅ Robust Sliding Mode + Backstepping controller (SMC-BS)
✅ Smooth 3D trajectory tracking simulation
✅ Built-in trajectory generator (circle, helix, lemniscate, or custom waypoints)
✅ Clean 3D animation with camera follow
✅ Fully parameterized & customizable physical model
✅ Designed in pure MATLAB — no Simulink required
🧠 Technical Details
-
Modeling: Full nonlinear 6-DOF quadrotor equations
-
Control Approach: Backstepping-based outer position loop + SMC inner attitude loop
-
Simulation: 12-state ODE integration
-
Controller Output: Thrust and torques
[u1, τφ, τθ, τψ] -
Reference Trajectories: Circle, Lemniscate, Helix, Custom
-
Languages: MATLAB (.m files)
-
Visualization: 3D animation & performance plots
📂 Included Files
| File | Description |
|---|---|
quad_params.m |
Physical parameters and controller gains |
quad_dynamics.m |
Nonlinear 12-state quadcopter model |
controller_SMC_backstepping.m |
Backstepping-SMC controller law |
generate_trajectory.m |
Generates predefined or custom 3D paths |
sim_quadcopter.m |
Main simulation script with plotting and animation |
animate_quadcopter.m |
3D animation of the drone trajectory |
Trajectory_of_Drone.mat |
Auto-saved trajectory data file |
README.md |
User manual & equations summary |
🧩 How to Run
1️⃣ Open MATLAB and set the project folder as the working directory
2️⃣ Generate a trajectory:
3️⃣ Run the main simulation:
4️⃣ Watch the 3D animation of the quadrotor tracking the path
5️⃣ Analyze results from plots (tracking error, attitude, control signals)
📊 Outputs
-
3D flight animation
-
Path tracking performance
-
Attitude and control torque plots
-
Position & velocity response graphs
-
SMC switching & robustness visualization
🎓 Ideal For
-
Control Systems & Robotics Researchers
-
Mechatronics and Aerospace Students
-
MATLAB & UAV Simulation Enthusiasts
-
Project-Based Learning or Thesis Demonstration
💡 Applications
-
Quadcopter trajectory control design
-
Nonlinear control simulation (SMC, Backstepping)
-
UAV dynamics study
-
Advanced robotics and autonomous flight systems
🖥️ System Requirements
-
MATLAB R2018a or newer
-
No additional toolboxes required
-
Works on Windows / macOS / Linux
📦 Deliverables
✔️ Fully functional MATLAB project folder (ZIP)
#MATLAB #Quadcopter #SMC #Backstepping #DroneSimulation #UAVControl #Robotics #TrajectoryTracking #EngineeringProject #Aerospace